
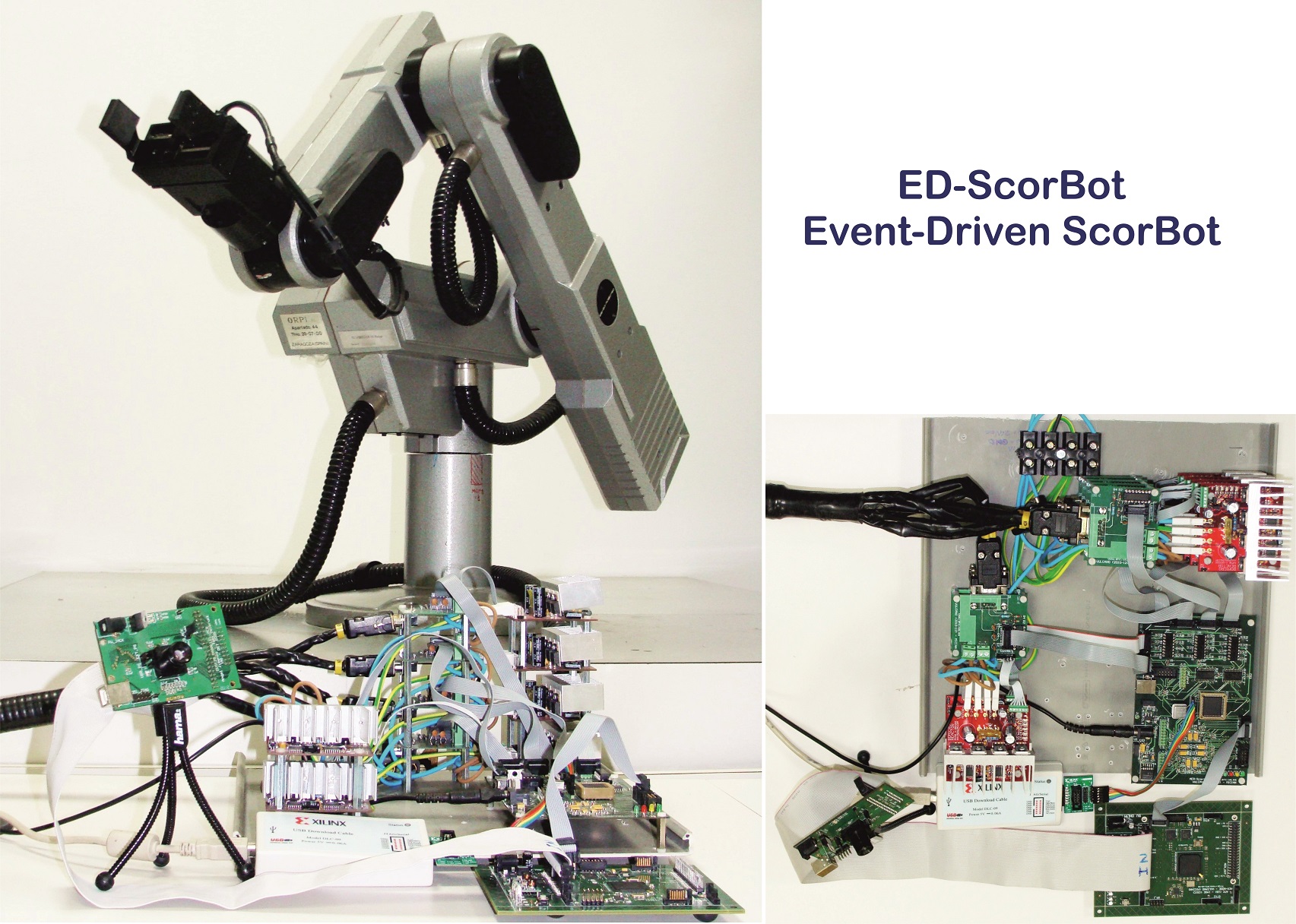
ED-ScorBot is a research platform that allows to implement and test, event-driven algorithm, mechanism or strategies, using AER (Address Event Representation). This platform used event (AER) from high level sensor (artificial retinas or cochleae) to robot’s encoders and motors. ED-ScorBot platform is composed by a modified and old-fashioned SCORBOT-ER VII. We have replaced the original control unit by an event-driven control unit.
The event-driven control unit is composed by several board: AER-Node, AER-Scorbot and Driver+Power boards.
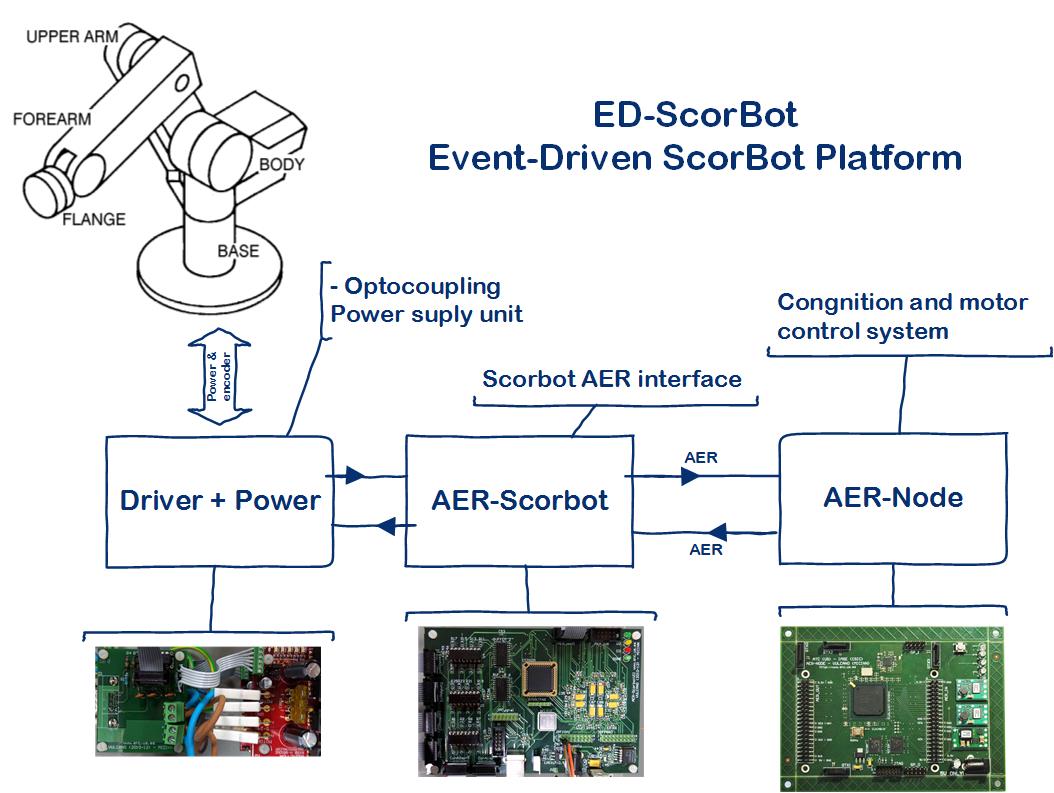
AER-Node is devoted to implement high level cognition system such as, vision or auditory processing system. This board can implement vision objects tracking algorithms; or auditory order processing. AER-Node also implements motor control such as SPID or SVITE, or any other event-driven motor control.
AER-Scorbot collects spikes from the AER-Node in order to set the desired position of each motor. It collects information from motors (encoders and current spent by each motor) and makes a conversion of this information to spikes in order to send it back to AER-Node. This boards is connected with the power boards.
Driver+Power boards: each power board is composed of a bidirectional optocoupling layer to isolate motor signals and logical signal from AER-Scorbot, and a Hall effect sensor. Information about encoder and current-sensing is sent to AER-Scorbot. Spikes from AER-SCORBOT are sent to the Driver board (an H-Bridge) to supply a suitable voltage and current to drive the motor.
More information in: www.atc.us.es/wiki –> Neumorphic Engineering
This work is supported by BIOSENSE
![]()