
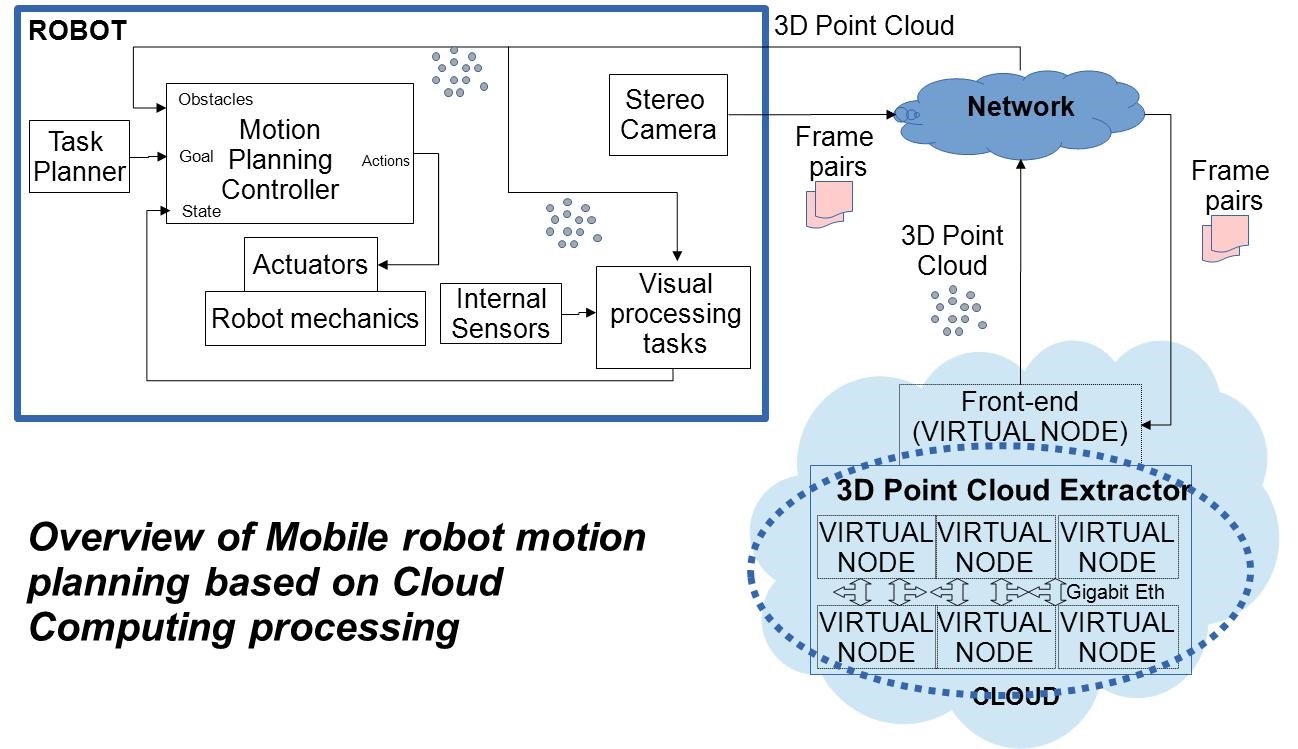
Abstract: Nowadays, the limitations of robot embedded hardware (which cannot be upgraded easily) make difficult to perform computationally complex tasks such as those of high level artificial vision. However, instead of disposing these “outdated” embedded systems, Cloud technologies for computation offloading can be used. In this paper we present and analyze an example of computation offloading in the context of artifical vision: point cloud extraction for stereo images. A prototype prepared for exploiting the cloud’s unique capabilities (such as elasticity) has been developed, and the inherent issues that appears are explained and addressed
Full text: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6840196