
Abstract: A shared control method, called Shared Control Dynamic Window Approach, is presented. It is inspired in the Dynamic Window Approach (DWA) for autonomous mobile robots. It takes user commands by means of the control interface and provide the most suitable and kinodinamically feasible trajectory that guarantees obstacle avoidance. It provides navigation assistance to drive vehicles in unstructured environments and other scenarios where dynamic constraints play an important role. In order to keep an intuitive control for the user, the intrusiveness of the method varies gradually and proportionally with the danger of collision. Preliminary experiments with users driving vehicles in a simulated world validate the method. Its implementation is public under General Public License.
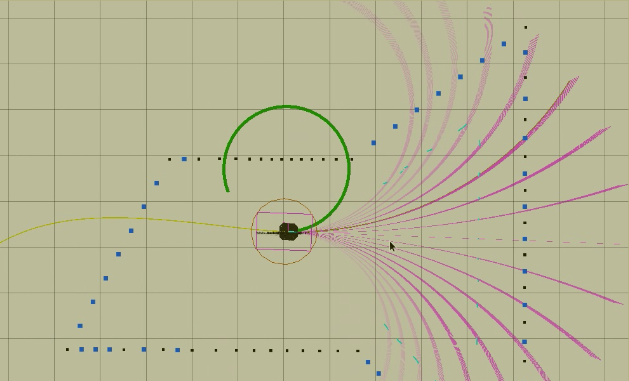
A capture of Shared Control working. Thick green circular arc indicate estimated user intentions. The rest of arcs are kinodynamycally feasible trajectories, from which Shared-DWA method selects the best trajectory
Full text: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6840152
Predictive Timing Control (PTC)